




開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)






















正反轉(zhuǎn)雙通道轉(zhuǎn)速傳感器
- 工作電源:Ub=15VDC±30% (8V~28V)
- 功耗電流:≤35mA
- 工作溫度:-40℃~125℃(頭部)
- 耐振性能:振動(10Hz~2KHz)30g,沖擊100g
- 密封性:IP6813.
- 絕緣強度:1000V 50Hz,1min(通道與外殼)
代化傳感器企業(yè)")
正反轉(zhuǎn)雙通道轉(zhuǎn)速傳感器與被測齒輪不接觸,無磨損,安裝方便,輸出波形是占空比約為50%左右的方波。該傳感器具備良好的低頻和高頻特性。低頻可至0Hz,可用于旋轉(zhuǎn)機械的零轉(zhuǎn)速測量,由于傳感器可給出兩路具有一定相位差的轉(zhuǎn)速信號,因此可進行正反轉(zhuǎn)判別;高頻可高至20KHz, 可滿足絕大部分工業(yè)領域的高轉(zhuǎn)速測量要求。
")
| 工作電源 | Ub=15VDC±30% (8V~28V) |
| 功耗電流 | ≤35mA |
| 工作溫度 | -40℃~125℃(頭部) |
| 耐振性能 | 振動(10Hz~2KHz)30g,沖擊100g |
| 密封性 | IP6813. |
| 電源極性保護 | 有 |
| 輸出短路保護 | 有 |
| 絕緣強度 | 1000V 50Hz,1min(通道與外殼) |
反轉(zhuǎn)轉(zhuǎn)速傳感器用于檢測輪軸的轉(zhuǎn)速和線速度,通過計算處理也可得到被測體的速度。該傳感器具備良好的低頻和高頻特性。低頻可至0Hz,用于旋轉(zhuǎn)機械的零轉(zhuǎn)速量,高至20KHz,可滿足絕大部分工業(yè)領域的高轉(zhuǎn)速測量要求。由于YD69可給出具有一定相位差的兩種轉(zhuǎn)速信號,因此可進行正反轉(zhuǎn)判別。安裝方便,與測齒輪不接觸,無磨損,輸出波形為方波,占空比約為50%;測速范圍寬,溫度適應廣,抗振性強,有電源極性保護和輸出短路保護。
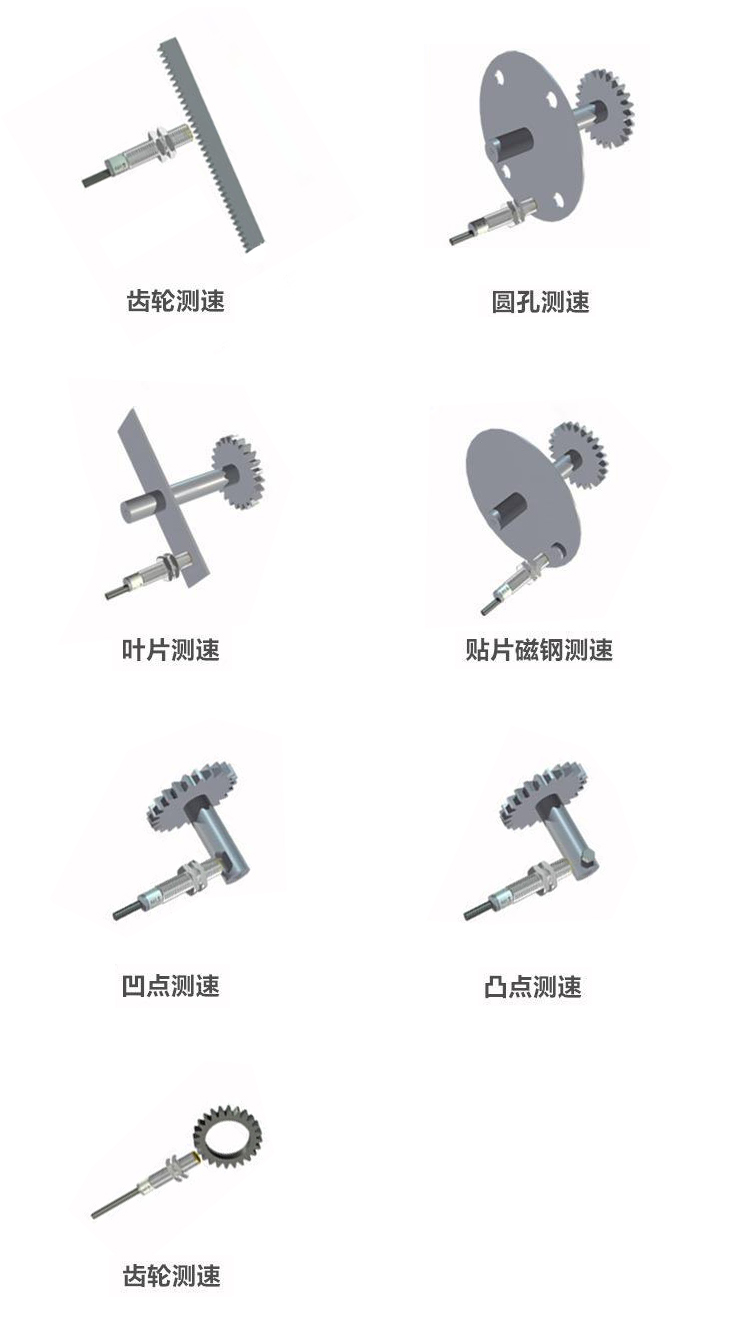
1.傳感器安裝
● 被測感應體為導磁體,上有齒或凹槽。
建議:測速齒輪 模數(shù)≥1.7,材料為導磁低碳鋼
注:非標齒或槽與平整面寬度不等將導致波形占寬比的變化。
● 安裝間隙:0.5-2mm,典型值為1.0mm
注:取決于被測件的振動情況
2.傳感器輸出特性
● 頻響特性:0~20kHz
● 輸出通道數(shù):雙通道
● 輸出波形:方波,上升、下降沿時間 12μs±40%
● 輸出幅度:高電平:U-0.7(U:電源電壓),低電平:< 0.1V
● 脈沖占空比:50%±25%
● 相位差: 90±30°(第一通道超前)
注:取決于安裝方式,旋轉(zhuǎn)件的旋轉(zhuǎn)方向,本參數(shù)適用于本說明書圖四舉例的安裝方式
● 負載能力: ±20mA (適合大)
● 輸出阻抗:<47Ω
● 供電電壓:Ub=+24VDC(5V~26V)
● 功耗電流:≤35mA
● 工作溫度:-40℃~+125℃
● 耐振性能:振動(10Hz~2KHz)30g,沖擊100g
● 密封性: IP68
● 電源極性保護:有
● 輸出短路保護:有
● 絕緣強度:1000V 50Hz,1min(通道與外殼)
● 外殼材料:不銹鋼304(可按用戶要求改用其他材料)
1.轉(zhuǎn)速測量原理
當測速齒輪旋轉(zhuǎn)時,傳感器將產(chǎn)生頻率f(Hz)= n×m/60(n為轉(zhuǎn)速,P為齒輪齒數(shù))的方波信號,供機車電子控制系統(tǒng)對機車速度、柴油機轉(zhuǎn)速、進行采樣檢測。
感應體必須是導磁體,可以是凹槽,也可以是凸起的螺釘或齒輪。
應用本傳感器測量轉(zhuǎn)速,涉及到以下幾個參數(shù):
m—被測旋轉(zhuǎn)導磁體上感應體的個數(shù)
n—轉(zhuǎn)速
f—輸入信號頻率
s—設定的儀表系數(shù)(依轉(zhuǎn)速測量儀表特性而定,部分轉(zhuǎn)速測量儀表直接設定齒數(shù),請依照選用的轉(zhuǎn)速測量儀表使用說明書選定儀表系數(shù))
其關系如下: S=
n = s f = 60 f / m
定好一個測量系統(tǒng)的感應體個數(shù)以后,儀表設定系數(shù)就已確定好,根據(jù)每一通道的傳感器所對的感應體個數(shù)確定好各通道的系數(shù)。
例如,對一個旋轉(zhuǎn)軸進行轉(zhuǎn)速測量,軸上有一個30齒音輪,相當于感應體齒 數(shù) Z = 30 ,那么傳感器每通道輸出的頻率為 f = (30/60)n,轉(zhuǎn)速 n = 2f,即測出的頻率數(shù)要乘以2才等于實際轉(zhuǎn)速。將轉(zhuǎn)速測量儀器系數(shù)設定在2 ,即s = 2 ,那就可以直接顯示轉(zhuǎn)子的實際轉(zhuǎn)速。同樣,如果每轉(zhuǎn)產(chǎn)生2個信號,則設系數(shù) s = 30 即可,其余類推。
3.正反轉(zhuǎn)判別測量原理
應用霍爾雙通道傳感器可方便的進行正反轉(zhuǎn)判別。
按 本說明書四中應用示例安裝,當旋轉(zhuǎn)方向如圖四所示定義為正轉(zhuǎn),輸出波形為通道1超前通道2 90度,波形示意圖如下所示:
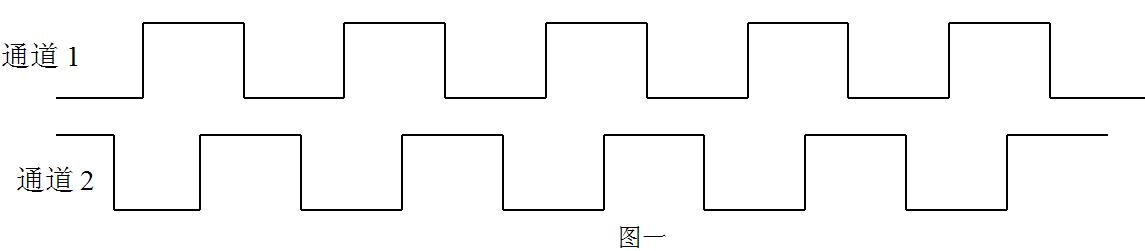
當旋轉(zhuǎn)方向與圖四 所示方向相反時,通道2波形將超前通道1波形90度,波形示意圖如下所示:
由上圖可知,對通道1、2的波形進行相位鑒別,即可進行正反轉(zhuǎn)判別。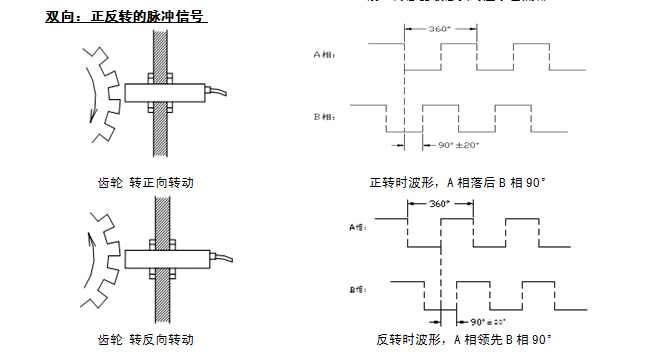



,將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
,將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
,將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
,將以原圖輸出?x-oss-process=image/format,webp)
開啟了相對路徑模式,本地址是站外域名,不能轉(zhuǎn)為相對路徑(在關閉開發(fā)者模式后不顯示這句話)#沒有設置高寬參數(shù),將以原圖輸出?x-oss-process=image/format,webp)
,將以原圖輸出?x-oss-process=image/format,webp)
,將以原圖輸出?x-oss-process=image/format,webp)












